GOOSE
Novel non-iterative fat water decomposition algorithm more robust to fat water swaps and related ambiguities.
Field map estimation is reformulated as a constrained surface estimation problem to exploit the spatial smoothness of the field, thus minimizing the ambiguities in the recovery. Specifically, the differences in the field map induced frequency shift between adjacent voxels are constrained to be in a finite range. The discretization of the above problem yields a graph optimization scheme, where each node of the graph is only connected with few other nodes. Thanks to the low graph connectivity, the problem is solved efficiently using a non-iterative graph cut algorithm. The global minimum of the constrained optimization problem is guaranteed. The performance of the algorithm is compared with that of state-of-the-art schemes by us as well as by the ISMRM fat water challenge committee (Our team name was KonfuPanda, whose performance was only 4/10000 points short of the best performing team).
.png)
Figure 1: Information flow in the proposed method.
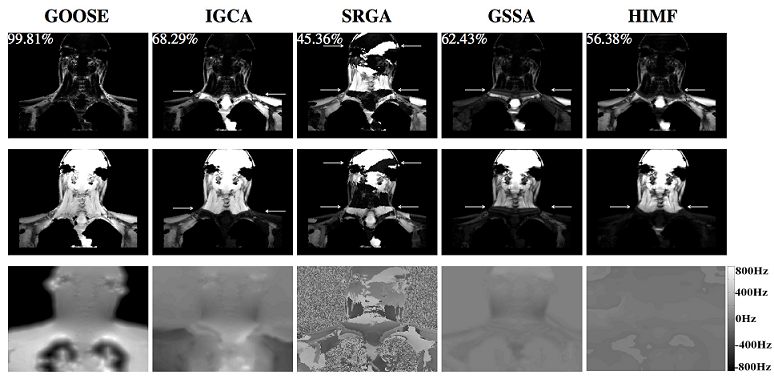
(Left) Figure 2: Qualitative comparisons on a head/neck dataset (2012 ISMRM Challenge dataset #2). Top row: Fat; Second: Water; Third: Field map.
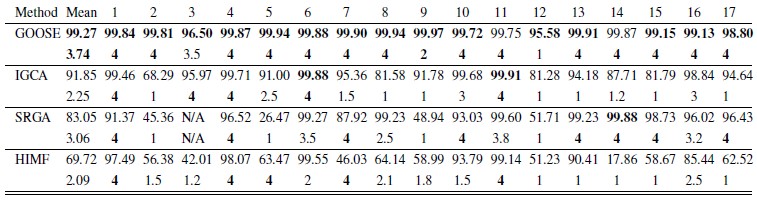
(Right) Table 1: Quantitative comparison of the proposed scheme against state-of-the-art algorithms and qualitative evaluation by a radiologist. The first row of each algorithm indicates quantitative scores (in percent) for the 17 datasets in 2012 ISMRM Challenge. The second row of each algorithm indicates the average qualitative score (out of four) assigned by the radiologist. Note that SRGA works only on uniformly sampled dataset and dataset #3 is non-uniformed sampled. Therefore no score is reported from SRGA for dataset #3.
Acknowledgement: The authors would like to thank the organizers and developers of the ISMRM fat water toolbox, which was used for the comparisons in this paper. The GOOSE toolbox implementation is built based on the Dr. Diego Hernando's graph cut algorithm in the ISMRM fat water toolbox. The authors would also like to thank the committee of 2012 ISMRM Challenge for providing data and codes to test our algorithm.
Reference:
-
C. Cui, X. Wu, J. Newell, M. Jacob, Fat water decomposition using GlObally Optimal Surface Estimation (GOOSE) algorithm. Magnetic Resonance in Medicine, in press.